アーカイブ情報
2025/10/31
【サービスロボット】 日本精工、プラットフォームの「リンク式サスペンション」技術検証完了
日本精工株(NSK)は、路面の凹凸や傾斜など屋外を中心に多様な走行環境にも対応可能なサービスロボット向けプラットフォームの開発を2023年から推進している。このサービスロボット向けプラットフォームは、屋外走行に関わる基本機能(屋外走行機能、安定搬送機能、自律走行機能)を低床ボディにパッケージ化したものとなる予定。 この度、同プラットフォームの走破性の高さを実現する重要な構成要素である「リンク式サスペンション」の技術検証が完了し、開発プロセスを大きく進めることができた。
今後、教育機関や飲食店などさまざまなユースケースで実証実験を行い、2027年内に同プラットフォームの市場投入を目指す。
背景
教育機関、飲食店、宿泊施設、物流などのサービス業や、工場の施設では、人手不足を背景として、あらゆるシーンで安定走行できるサービスロボットの需要が高まっている。
しかし、屋外を中心に、整備されていない路面や段差やスロープ、点字ブロックなど路面の凹凸が多い環境でのロボット導入は、技術的な課題が大きいため実用化が難しい状況が続いている。
開発経緯
NSKは、中期経営計画「MTP2026」でBearings&Beyond※1という言葉を掲げ、祖業であるベアリング事業で培ってきた技術やノウハウなどを生かして、新しい事業の展開に挑戦している。その一環として、2023年から多様な走行環境へ対応するサービスロボット向けプラットフォームの開発を進めており、2027年内に市場投入を目指している。
※1 Bearings&Beyond :NSKの祖業であるベアリングビジネスをさらに伸ばし、これまで培ってきた技術、ノウハウ、商品力を生かして既存領域を超えた事業展開を行っていく意思を示した言葉。
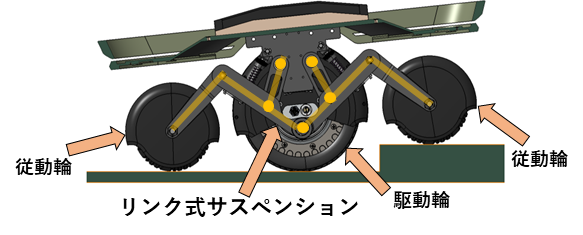
この度、その重要な構成要素である「リンク式サスペンション」の技術検証が完了し、開発プロセスを大きく進めることができた。リンク式サスペンションとは、パンタグラフ形状のリンク機構を介して駆動輪・従動輪を接続している装置であり、屋外での整備されていない路面や、段差などで路面に凹凸があっても駆動輪を確実に接地させることができるため、サービスロボットの安定した推進力と走行性能を確保できる。
同サスペンションは、2023年に発表したプロトタイプをベースとして、2024年から始めた立命館大学での実証プロジェクト※2を通じて、NSKが改良を加えた新型モデル。
今後の予定
同サスペンションを搭載したサービスロボット向けプラットフォームは低床ボディという特長を持つため、サービスロボットとしての車体低床化にも期待ができ、結果としてサービスロボットの小型化にも貢献する。そのため屋内外問わず、小型なロボットのニーズが高いサービスロボット市場でも、需要が見込まれる。
今後、屋内外のさまざまなユースケースにおいて実証実験を実施し、その知見を生かしてプラットフォームの高機能化を進め、2027年内にサービスロボット向けプラットフォームの市場投入を目指す。その際、NSKが長年培ってきたコア技術を生かしたプラットフォームを「サービスインテグレーション(さまざまな技術を組み合わせること)」に取り入れることで、より現場のニーズに即したソリューションを提供する。
※2 立命館大学での実証プロジェクト
・概要
立命館大学大阪いばらきキャンパス内における、屋外警備ロボットの実証実験のプロジェクト。立命館大学の協力のもと、NSKが2024年に開始し、2025年10月現在も推進中。屋外警備ロボット実用化の事例は限られており、大学キャンパス内における大規模な屋外警備ロボットの実証実験は国内でも先進的な取り組み。
・背景
NSKが立命館大学から、大阪いばらきキャンパスのリビングラボ環境や警備に関する知見の提供を受け、実証試験を開始した。

・屋外警備ロボットの特長
NSK開発の「リンク式サスペンション」を搭載することで段差やスロープ、点字ブロックなどの凹凸がある屋外でも安定した走行を実現している。また、サービスインテグレーションを通じて、より現場ニーズに即した機能を搭載している。
[機能の例]
・赤外線ライトとAI画像解析技術の組み合わせにより、暗闇でも高精度で不審者や危険物を検出
・GNSS(Global Navigation Satellite System、全球測位衛星システム)により、ロボットを客観的に監視することで誤った場所への侵入を防止し、安全な巡回走行を実現。

- カテゴリー
- コンバーティングニュース
