アーカイブ情報
2024/7/6
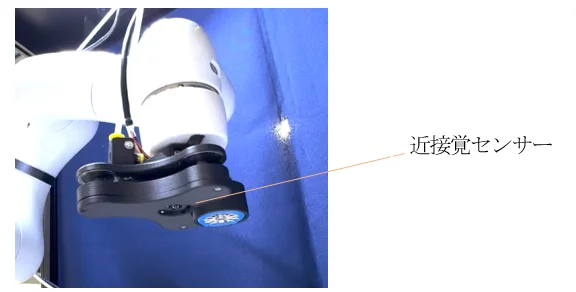
【バラ積みピッキングロボット】ユアサ商事とThinker、近接覚センサーと2Dカメラを利用し開発
ユアサ商事はThinkerと共同で、バラ積みピッキングロボットを開発した。
これまで、薄く繊細な成型物(せんべいや薄型の樹脂成型品等)は破損しやすく、ピッキングの自動化が難しい分野であった。今回の開発により、近接覚センサー(ロボットの指先センサー)と二次元(2D)カメラを利用したシステムにより、対象物への距離感を素早く解析しスピードを調整することが可能となった。この繊細な動きを利用し、薄く繊細な成型物のピッキング自動化、ひいては製造業の省人化に貢献する。
従来のロボットシステムでは、奥行きの距離感を認識することが難しく、対象物を傷つけないようにするためには対象物の重なりを防ぐベルトコンベアーなどの大きな設備、さらには高額な3次元(3D)カメラシステムの導入が必要であった。また画像解析に時間がかかることも障壁となっていた。開発したバラ積みピッキングロボットは以下のソリューションを実現する。

これまで価格面やスペースの制限などにより、ピッキングの自動化システムの導入が困難だったピロー包装機へのワーク導入・次工程へのピック&プレイスなどへの導入が可能す。
今後、薄くて割れやすい煎餅などの食品のピック&プレイスをはじめ、製造工程において、山積みとなっているワーク(樹脂・薄い金属等)の多様な用途に導入していく予定。
- カテゴリー
- コンバーティングプロダクツ&テクノロジー
