アーカイブ情報
2024/12/2
【力触覚技術】慶應義塾大学と大林組、「自動火薬装填システム」でトンネル切羽発破に成功
NEDOの「官民による若手研究者発掘支援事業」(以下、若サポ)の一環で、慶應義塾大学の野崎貴裕准教授らの研究グループと大林組は、遠隔で力触覚を再現する技術(リアルハプティクス®)を応用し、2023年に山岳トンネルの掘削面(切羽)での火薬の装填(そうてん)作業を遠隔化・自動化する「自動火薬装填システム」を開発した。今回、同システムを用いて、トンネル外から遠隔で実火薬を装填し、発破することに成功した。また、装薬孔検知技術などを連携させ、同システムでの作業自律化にも成功し、生産性の向上が期待される。
今後、起爆用爆薬を供給する装置(親ダイ供給装置)の搭載や、大型重機の自動運転との連携、さらに火薬の脚線結線作業の自動化を進め、一連の技術の現場適用を目指す。また、各作業を自律学習させることで、トンネル掘削作業の無人化につながる開発を進めていく。

背景
山岳トンネル工事における重大災害の多くは、支保工建て込み作業※1と、切羽(きりは)直下※2での火薬の装填・結線作業で発生している。このうち、重機を使用する支保工建て込みなどの作業は遠隔化・自動化が進んでいる※3。一方、火薬の装填・結線作業は、火薬や雷管※4などの危険性が高い材料や、細かい脚線を取り扱うことから、繊細な力加減や手指の感覚を必要とする。「山岳トンネル工事の切羽における肌落ち災害防止対策に係るガイドライン(厚生労働省)」に基づき、安全対策を講じながら手作業で施工しているが、さらなる作業の安全性確保と生産性向上が求められている。
NEDOの若サポ※5の一環で、慶應義塾大学の野崎貴裕准教授らの研究グループと大林組は、リアルハプティクス®※6を応用して、切羽直下での火薬の装填・結線作業を遠隔化・自動化する研究に取り組み、2023年9月に自動火薬装填システム※7を開発し、室内試験にて遠隔装填技術と遠隔装填技術で伝送される力触覚のデータを利用した自動装填に成功した。
トンネル工事における遠隔装填
今回のシステムは、リアルハプティクス®により力触覚が伝わることで、切羽から離れた安全な場所から、あたかも切羽で直接作業を行っているかのように直感的な火薬の装填作業が行える。今回の実証実験では、同システムを長野県下伊那郡にあるトンネル工事現場(国土交通省中部地方整備局令和4年度三遠南信6号トンネル工事)で適用。大型重機に搭載した装填ロボットを、切羽から30m地点(2024年7月下旬)と、切羽から320m離れたトンネル外で(2024年10月)操作して、火薬の装填、発破を行った。
(1)火薬供給装置との連携
本システムに、紙巻や粒状の火薬供給装置との連携を行い、さまざまな火薬の遠隔装填に成功している。今回の実証実験では、紙巻の含水爆薬には熊谷組が開発した装置※8、粒状の含水爆薬には粒状爆薬供給装置※9を使用。アンホ爆薬やバルクエマルジョン爆薬などの火薬供給装置とも連携することができ、安全な場所から火薬を供給し、装填することが可能。
(2)トンネル外からの遠隔装填
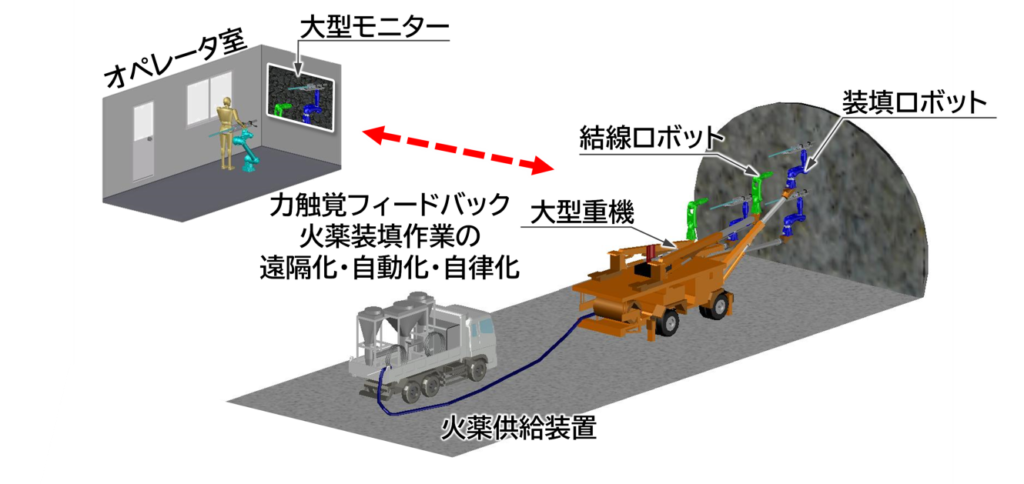
遠隔装填は、トンネル外のオペレータ室に設置したリモコン側と、トンネル内の切羽で実際に作業する装填ロボット側※10で構成される。大型重機で装填ロボットを装薬孔の近くまで移動後、トンネル外のオペレータ室で装薬孔周辺を映したモニターを見ながら、リアルハプティクス®によりリモコンと装填ロボットの触覚を相互に再現することで、遠隔操作による火薬装填に成功した。

本システムにおける装填作業の自律化
装填ロボットに搭載したステレオカメラで装薬孔の位置、装薬孔とロボットの角度を検知し、装填ロボットを自動誘導後、装填ロボットの押し込み作業を再現することで、火薬装填作業の自律化に成功した。大型重機で装薬孔の近くまで装填ロボットを近づけた後は、火薬装填作業の自律化が可能になる。

今後の予定
今後、若サポにて、野崎貴裕准教授らの研究グループと大林組は、【1】自動火薬装填システムに親ダイ供給装置を搭載、【2】大型重機の自動運転と自動火薬装填システムの連携、【3】脚線結線※11作業の自動化を進めることで、一連の技術の現場適用を目指す。
リアルハプティクス®は位置や力といった動作情報を記録し、再現することが可能。この技術を応用することで、トンネル掘削作業の無人化を実現し、安全かつ効率的な働き方を目指した技術の開発を進める。
なお、慶應義塾大学と大林組は本研究開発成果について、土木学会第34回トンネル工学研究発表会(2024年12月3日~4日)や岩の力学連合会第16回岩の力学国内シンポジウム(2025年1月14日~16日)で発表を予定している。
紹介動画:「自動火薬装填システム」でトンネル切羽発破に成功
※1 支保工建て込み作業
山岳トンネル施工において、地山を保持するアーチ状のH型の鋼材である鋼製支保工を設置する作業。
※2 切羽直下
切羽の上面部分(天端)から45度の範囲内を指す。
※3 重機を使用する支保工建て込みなどの作業は遠隔化・自動化が進んでいる。
慶應義塾大学と大林組は、これまでもリアルハプティクス®を油圧駆動の建設機械や左官作業に適用するなど、建設現場における力触覚の活用に向けたシステムの開発、実証を行ってきた。
2021年3月24日「リアルハプティクスを利用した建設技能作業再現システムを開発」
2019年10月10日「油圧駆動の建設重機で力触覚技術を利用するシステムを実証しました」
2018年10月15日「油圧駆動の建設重機での力触覚技術利用を可能とするシステムを開発」
※4 雷管
わずかな熱や衝撃でも発火する火薬を筒に込めた火工品で、トンネル掘削では電気雷管や導火管付き雷管が使われる。
※5 若サポ
NEDO官民による若手研究者発掘支援事業
本研究開発は、若サポ・共同研究フェーズとして2021年度より進めている。
※6 リアルハプティクス®
現実の物体や周辺環境との接触情報を双方向で伝送し、力触覚を再現する技術。人間が物体に触った際に感じる硬さや柔らかさ、風船のような弾力、自律的な動きなどの力触覚を伝送することで、遠隔にいる操作者の手元で同様の力触覚が再現できる。慶應義塾大学では、力触覚技術が示す学術的な成果を応用し、広く医療・産業界に普及させることを目的として2014年にハプティクス研究センター(センター長:慶應義塾大学新川崎先端研究教育連携スクエア 大西公平特任教授)を設置し、研究開発を進めている。
※7 自動火薬装填システム
2023年9月12日「山岳トンネル掘削作業における自動火薬装填システムの開発」
※8 熊谷組が開発した装置
熊谷組のリンク
※9 粒状爆薬供給装置
粒状の含水爆薬やアンホ爆薬をエアーで装薬孔へ圧送し装填する装置のことです。
※10 リモコン側と、トンネル内の切羽で実際に作業する装填ロボット側
遠隔操作においては、リアルハプティクス技術における操作用のシステムであるリーダと作業用のシステムであるフォロワが用いられるが、ここでは一般的な表現として、作業者が操作するリーダサイドを「リモコン側」、フォロワサイドを「ロボット側」と呼称している。
※11 脚線結線
電気雷管や導火管付き雷管などの雷管を起爆させるための脚線を結ぶ作業のこと。
- カテゴリー
- コンバーティングニュース
