アーカイブ情報
2026/1/15
【搬送ロボット】東京都立産業技術研究センター、段差に強い全方向搬送ロボットを開発
建設現場では、人手不足を背景に搬送作業の自動化が求められている。しかし多くの現場では床に段差や継ぎ目があり、また狭い場所での移動が必要であるため、従来の搬送ロボットでは対応できないケースがあった。
東京都立産業技術研究センター(都産技研)は、段差乗り越え性能を従来比最大7.5倍(注1)に向上させた全方向移動機構を開発した(特願2025-166635)。本技術は車輪サイズを変えずに実現しており、建設現場のほか、工場・倉庫・医療介護施設など、狭い場所での搬送自動化に貢献する。
同技術は、2026年1月21日から東京ビッグサイトで開催される第10回ロボデックス(都産技研ブース S3-26)にて実機デモを行う。
注1:同一の車輪サイズかつ車体と平行な段差に対して同技術を適用した場合
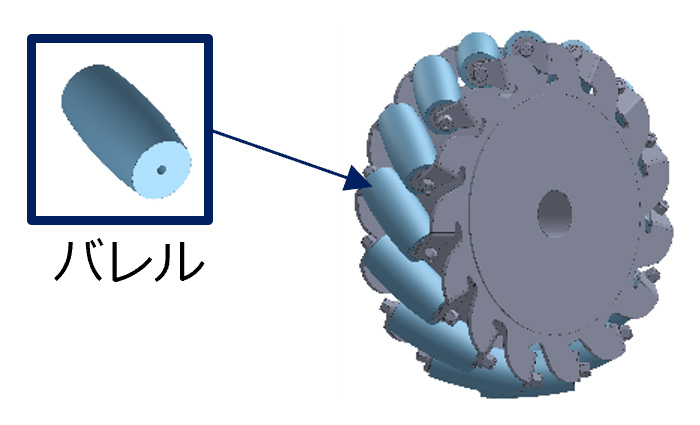
メカナムホイールとは
メカナムホイールは、車輪の周囲に45度に傾いたローラ(バレル)を複数配置した特殊な車輪(図1)。4つの車輪の回転方向を個別に制御することで、車体の向きを変えずに前後左右あらゆる方向へ移動できる。狭い通路での長尺物搬送や、アームを搭載した作業ロボットなどに採用されている。
しかし従来のメカナムホイールには、横移動時に段差乗り越え性能が低くなること、またエネルギー損失が大きく推進力が低くなるという2つの課題があった。
開発のポイント
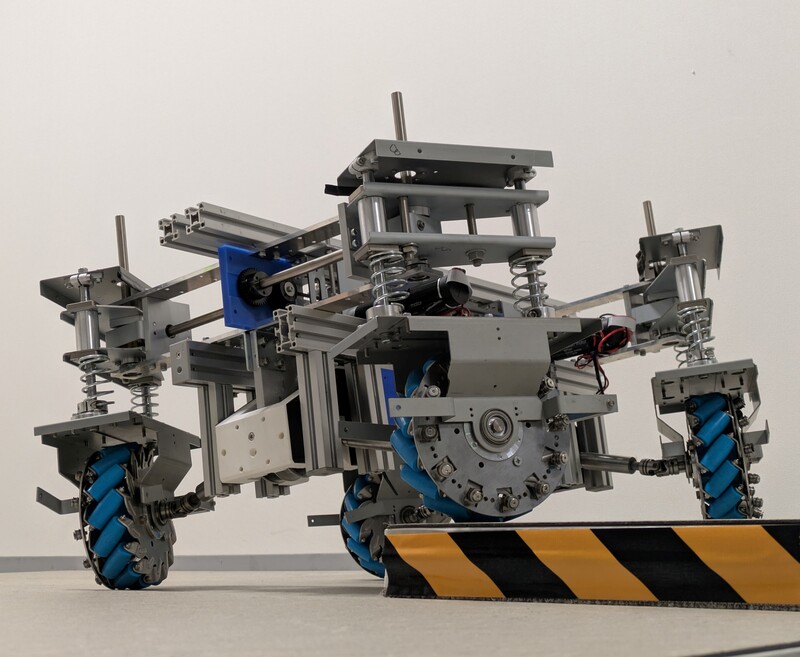
同研究では、ロボットを真上から見たときの車輪の傾きである「トー角」を、0度から25度まで走行中に変更できる機構を開発した(図2)。これにより、以下の3つの効果が得られる。
① 段差乗り越え性能の向上
トー角を変えることで車輪のエッジが段差に接触しやすくなる。このエッジに防滑部品を取り付けることで、乗り越え性能が大幅に向上した。前後移動時にも有効である
② 推進力の向上
従来は損失していた力を転換することで、推進力を従来比1.5倍(注2)に向上させた。ベアリング追加による改善策ではバレルの回転軸が細くなり耐荷重が低下するが、本方式では耐荷重を維持したまま推進力を高めることができる。
注2:同一ロボットでトー角0度と25度を比較した場合
③ 位置決め精度の維持
全方向移動機能を保持しているため、高い位置決め精度を維持できる。また、移動しながらトー角を変更できるため、4輪ステアリング方式のような方向転換時の一時停止が不要であり、タイムロスが発生しない。
今後の予定
同システムの実機デモおよび開発担当者による説明を、下記展示会にて行う。
展示会名:第10回 ロボデックス
会期:2026年1月21日(水)〜23日(金) 10:00〜17:00
会場:東京ビッグサイト 南棟1階(小間番号 S3-26)
- カテゴリー
- news
- コンバーティングニュース
